German researchers have built an anthropomorphic robot hand that can endure collisions with hard objects and even strikes from a hammer without breaking into pieces.
In designing the new hand system, researchers at the Institute of Robotics and Mechatronics, part of the German Aerospace Center (DLR), focused on robustness. They may have just built the toughest robot hand yet.
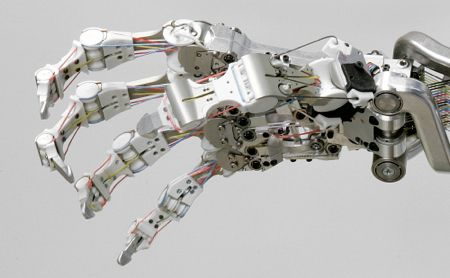
The DLR hand has the shape and size of a human hand, with five articulated fingers powered by a web of 38 tendons, each connected to an individual motor on the forearm.
The main capability that makes the DLR hand different from other robot hands is that it can control its stiffness. The motors can tension the tendons, allowing the hand to absorb violent shocks. In one test, the researchers hit the hand with a baseball bat—a 66 G impact. The hand survived.
The video below shows the fingers moving and the hand getting hit by a hammer and a metal bar:
The DLR team didn’t want to build an anatomically correct copy of a human hand, as other teams have. They wanted a hand that can perform like a human hand both in terms of dexterity and resilience.
The hand has a total of 19 degrees of freedom, or only one less than the real thing, and it can move the fingers independently to grasp varied objects. The fingers can exert a force of up to 30 newtons at the fingertips, which makes this hand also one of the strongest ever built.

During normal operation, the finger joints can turn at about 500 degrees per second. By tensioning the springs, and then releasing their energy to produce extra torque, the joint speed can reach 2000 degrees per second. This means that this robot hand can do something few others, if any, can: snap its fingers.
Why build such a super strong hand?
Markus Grebenstein, the hand’s lead designer, says that existing robot hands built with rigid parts, despite their Terminator-tough looks, are relatively fragile. Even small collisions, with forces of a few tens of newtons, can dislodge joints and tear fingers apart.
“If every time a robot bumps its hand, the hand gets damaged, we’ll have a big problem deploying service robots in the real world,” Grebenstein says.
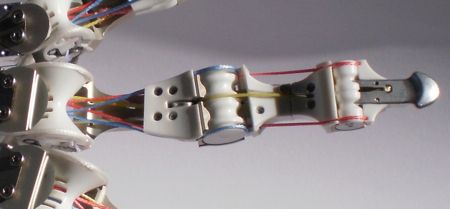
To change its stiffness, the DLR hand uses an approach known as antagonistic actuation. The joints of each finger [photo below] are driven by two tendons, each attached to one motor. When the motors turn in the same direction, the joint moves; when they turn in opposite directions, the joint stiffens.
Other hands, such as the Shadow hand designed in the U.K., also use antagonistic actuation. But the Shadow uses pneumatic artificial muscles, which have limitations in how much they can vary their stiffness.
Before developing the new hand, Grebenstein designed the hand of another advanced robot, the humanoid Justin. He says that in one experiment they would throw heavy balls and have Justin try to catch them. “The impact would strain the joints beyond their limits and kill the fingers,” he says.
The new hand can catch a ball thrown from several meters away. The actuation and spring mechanisms are capable of absorbing the kinetic energy without structural damages.
But the hand can’t always be in a stiff mode. To do manipulation tasks that require accuracy, it’s better to have a hand with low stiffness. By adjusting the tendon motors, the DLR hand can do just that.
To operate the hand, the researchers use special sensor gloves or simply send grasping commands. The control system is based on monitoring the joint angles. It doesn’t need to do impedance control, Grebenstein says, because the hand has compliance within the mechanics.
To detect whether an object is soft and must be handled more gently, the hand measures force by keeping track of the elongation of the spring mechanisms.
“In terms of grasping and dexterity, we’re quite close to the human hand,” he says, adding that the new hand is “miles ahead” of Justin’s hands.
About 13 people have worked on the hand, and Grebenstein insists it’s hard to estimate the cost of the project. But he says that the hardware for one hand would cost between 70,000 and 100,000 euros.
Related articles
- Building a Super Robust Robot Hand (spectrum.ieee.org)
- German robot hand takes a licking, apparently keeps on ticking (video) (engadget.com)
